
知识专区


这篇博客将介绍OpenCV中的图像变换,包括用Numpy、OpenCV计算图像的傅里叶变换,以及傅里叶变换的一些应用;
2D Discrete Fourier Transform (DFT)二维离散傅里叶变换
Fast Fourier Transform (FFT) 快速傅里叶变换
傅立叶变换用于分析各种滤波器的频率特性。对于图像采用二维离散傅立叶变换(DFT)求频域。一种称为快速傅立叶变换(FFT)的快速算法用于DFT的计算。
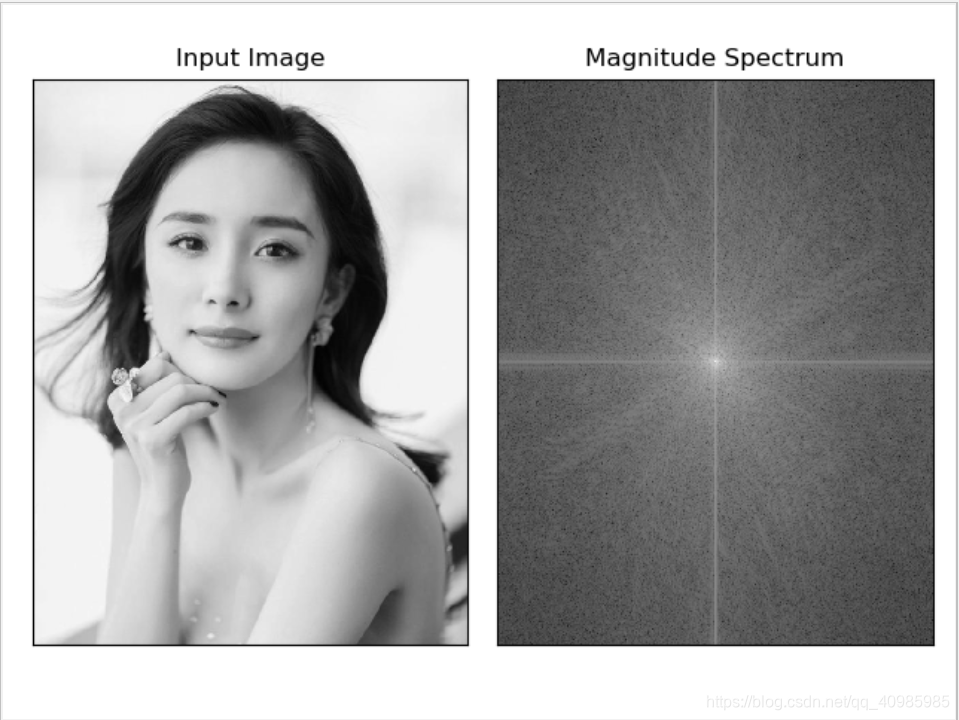
灰度图 VS 傅里叶变换效果图如下:
可以看到白色区域大多在中心,显示低频率的内容比较多。
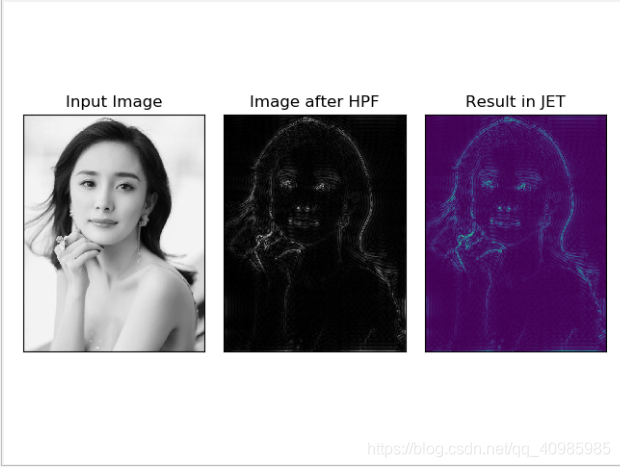
傅里叶变换去掉低频内容后效果图如下:
可以看到使用矩形滤波后,效果并不好,有波纹的振铃效果;用高斯滤波能好点;
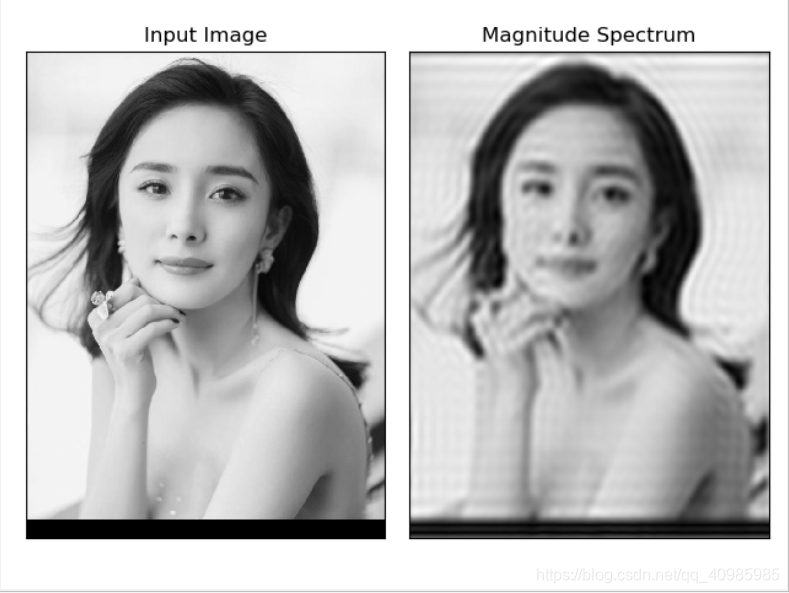
傅里叶变换去掉高频内容后效果图如下:
删除图像中的高频内容,即将LPF应用于图像,它实际上模糊了图像。
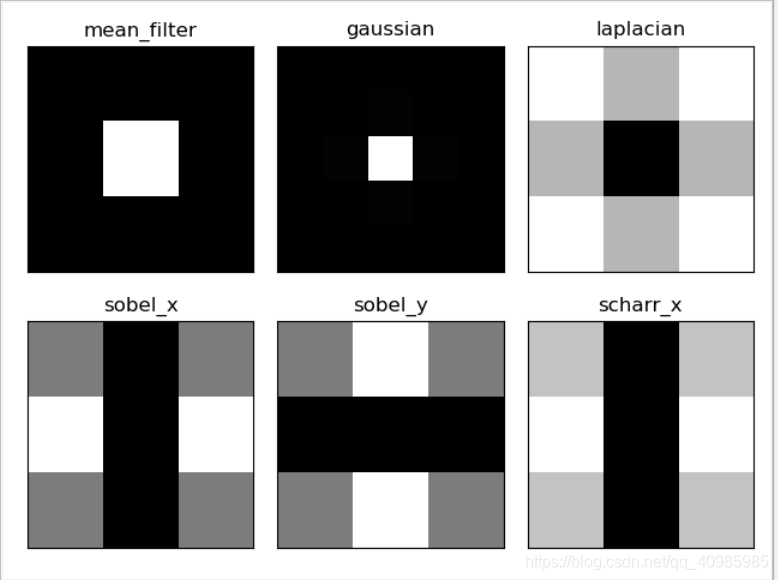
各滤波器是 HPF(High Pass Filter)还是 LPF(Low Pass Filter),一目了然:
拉普拉斯是高频滤波器;
为达到最佳性能,可以通过OpenCV提供的函数cv2.getOptimalDFTSize() 寻找最佳尺寸。
然后将图像填充成最佳性能大小的阵列,对于OpenCV,必须手动填充零。但是对于Numpy,可以指定FFT计算的新大小,会自动填充零。
通过使用最优阵列,基本能提升4倍的效率。而OpenCV本身比Numpy效率快近3倍;
拉普拉斯是高通滤波器(High Pass Filter)
# 傅里叶变换 import cv2 import numpy as np from matplotlib import pyplot as plt img = cv2.imread('ym3.jpg', 0) # 使用Numpy实现傅里叶变换
:fft包 # fft.fft2() 进行频率变换 # 参数1:输入图像的灰度图 # 参数2:>输入图像 用0填充; <输入图像 剪切输入图像; 不传递 返回输入图像
f = np.fft.fft2(img) # 一旦得到结果,零频率分量(直流分量)将出现在左上角。
# 如果要将其置于中心,则需要使用np.fft.fftshift()将结果在两个方向上移动。
# 一旦找到了频率变换,就能找到幅度谱。
fshift = np.fft.fftshift(f)
magnitude_spectrum = 20 * np.log(np.abs(fshift))
plt.subplot(121), plt.imshow(img, cmap='gray')
plt.title('Input Image'), plt.xticks([]), plt.yticks([]) plt.subplot(122), plt.imshow(magnitude_spectrum, cmap='gray')
plt.title('Magnitude Spectrum'), plt.xticks([]), plt.yticks([]) plt.show() # 找到了频率变换,就可以进行高通滤波和重建图像,也就是求逆DFT
rows, cols = img.shape crow, ccol = rows // 2, cols // 2 fshift[crow - 30:crow + 30, ccol - 30:ccol + 30] = 0 f_ishift = np.fft.ifftshift(fshift)
img_back = np.fft.ifft2(f_ishift)
img_back = np.abs(img_back) # 图像渐变章节学习到:高通滤波是一种边缘检测操作。这也表明大部分图像数据存在于频谱的低频区域。
# 仔细观察结果可以看到最后一张用JET颜色显示的图像,有一些瑕疵(它显示了一些波纹状的结构,这就是所谓的振铃效应。)
# 这是由于用矩形窗口mask造成的,掩码mask被转换为sinc形状,从而导致此问题。所以矩形窗口不用于过滤,更好的选择是高斯mask。)
plt.subplot(131), plt.imshow(img, cmap='gray')
plt.title('Input Image'), plt.xticks([]), plt.yticks([]) plt.subplot(132), plt.imshow(img_back, cmap='gray')
plt.title('Image after HPF'), plt.xticks([]), plt.yticks([]) plt.subplot(133), plt.imshow(img_back)
plt.title('Result in JET'), plt.xticks([]), plt.yticks([])
plt.show()
import cv2 import numpy as np from matplotlib import pyplot as plt img = cv2.imread('ym3.jpg', 0) rows, cols = img.shape print(rows, cols) # 计算DFT效率最佳的尺寸
nrows = cv2.getOptimalDFTSize(rows)
ncols = cv2.getOptimalDFTSize(cols)
print(nrows, ncols)
nimg = np.zeros((nrows, ncols))
nimg[:rows, :cols] = img img = nimg # OpenCV计算快速傅里叶变换,输入图像应首先转换为np.float32,然后使用函数cv2.dft()和cv2.idft()。
# 返回结果与Numpy相同,但有两个通道。第一个通道为有结果的实部,第二个通道为有结果的虚部。
dft = cv2.dft(np.float32(img), flags=cv2.DFT_COMPLEX_OUTPUT)
dft_shift = np.fft.fftshift(dft)
magnitude_spectrum = 20 * np.log(cv2.magnitude(dft_shift[:, :, 0], dft_shift[:, :, 1]))
plt.subplot(121), plt.imshow(img, cmap='gray')
plt.title('Input Image'), plt.xticks([]), plt.yticks([]) plt.subplot(122), plt.imshow(magnitude_spectrum, cmap='gray')
plt.title('Magnitude Spectrum'), plt.xticks([]), plt.yticks([]) plt.show() rows, cols = img.shape crow, ccol = rows // 2, cols // 2 # 首先创建一个mask,中心正方形为1,其他均为0
# 如何删除图像中的高频内容,即我们将LPF应用于图像。它实际上模糊了图像。
# 为此首先创建一个在低频时具有高值的掩码,即传递LF内容,在HF区域为0。
mask = np.zeros((rows, cols, 2), np.uint8) mask[crow - 30:crow + 30, ccol - 30:ccol + 30] = 1 # 应用掩码Mask和求逆DTF
fshift = dft_shift * mask f_ishift = np.fft.ifftshift(fshift)
img_back = cv2.idft(f_ishift)
img_back = cv2.magnitude(img_back[:, :, 0], img_back[:, :, 1]) plt.subplot(121), plt.imshow(img, cmap='gray')
plt.title('Input Image'), plt.xticks([]), plt.yticks([]) plt.subplot(122), plt.imshow(img_back, cmap='gray')
plt.title('Magnitude Spectrum'), plt.xticks([]), plt.yticks([]) plt.show()
import cv2 import numpy as np from matplotlib import pyplot as plt # 简单的均值滤波
mean_filter = np.ones((3, 3)) # 构建高斯滤波
x = cv2.getGaussianKernel(5, 10) gaussian = x * x.T # 不同的边缘检测算法Scharr-x方向
scharr = np.array([[-3, 0, 3], [-10, 0, 10], [-3, 0, 3]])
# Sobel_x sobel_x = np.array([[-1, 0, 1], [-2, 0, 2], [-1, 0, 1]])
# Sobel_y sobel_y = np.array([[-1, -2, -1], [0, 0, 0], [1, 2, 1]]) # 拉普拉斯
laplacian = np.array([[0, 1, 0], [1, -4, 1], [0, 1, 0]])
filters = [mean_filter, gaussian, laplacian, sobel_x, sobel_y, scharr]
filter_name = ['mean_filter', 'gaussian', 'laplacian', 'sobel_x', \ 'sobel_y', 'scharr_x']
fft_filters = [np.fft.fft2(x) for x in filters] fft_shift = [np.fft.fftshift(y) for y in fft_filters]
mag_spectrum = [np.log(np.abs(z) + 1) for z in fft_shift] for i in range(6):
plt.subplot(2, 3, i + 1), plt.imshow(mag_spectrum[i], cmap='gray')
plt.title(filter_name[i]), plt.xticks([]), plt.yticks([]) plt.show()





